[J1] Advanced User Interfaces for Teleoperated Surgical Robotic Systems
Published in Advanced Sensor Research, 2023
Recommended citation: Chi Cong, Nguyen. (2023). "Advanced User Interfaces for Teleoperated Surgical Robotic Systems" Advanced Sensor Research. Vol2(2200036). https://onlinelibrary.wiley.com/doi/full/10.1002/adsr.202200036
Abstract
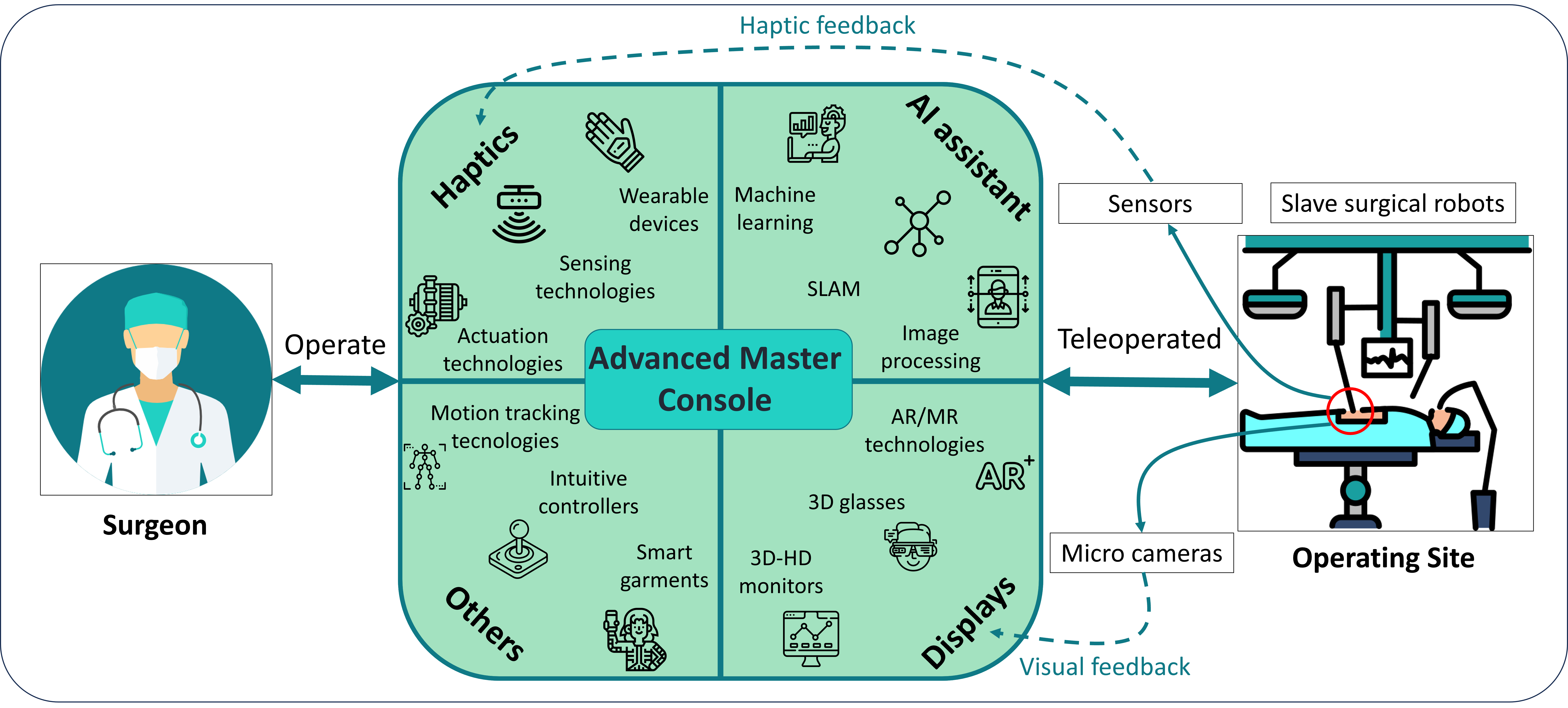
In recent years, advances in modern technology have altered the practice of surgery from open to minimally invasive surgery (MIS) aided by robots. Teleoperated surgical robotic systems (TSRSs) provide numerous significant benefits for MIS over traditional approaches, including improved safety, more efficient and precise surgery, better cosmesis, shorter recovery time, and reduced postoperative pain. Existing TSRSs’ master consoles, with improvements in vision systems, designs, and control methods, have significantly enhanced human–robot interactions, resulting in safer and more accurate medical intervention operations. Despite advances, haptic technologies, including sensors, machine assistance, and intuitive devices for user interfaces, are still limited, resulting in less effective usage of TSRSs for surgical operations. This review presents a summary of the emerging TSRSs with a focus on their user interfaces. In addition, advanced sensing, haptic, smart garments, and medical image artificial intelligence (AI) assistance technologies are shown with their potential for use in master consoles of the TSRSs are shown. Finally, a discussion on the need for a smart human-robot interface for TSRSs is given.
PDF —— Graphical Abstract