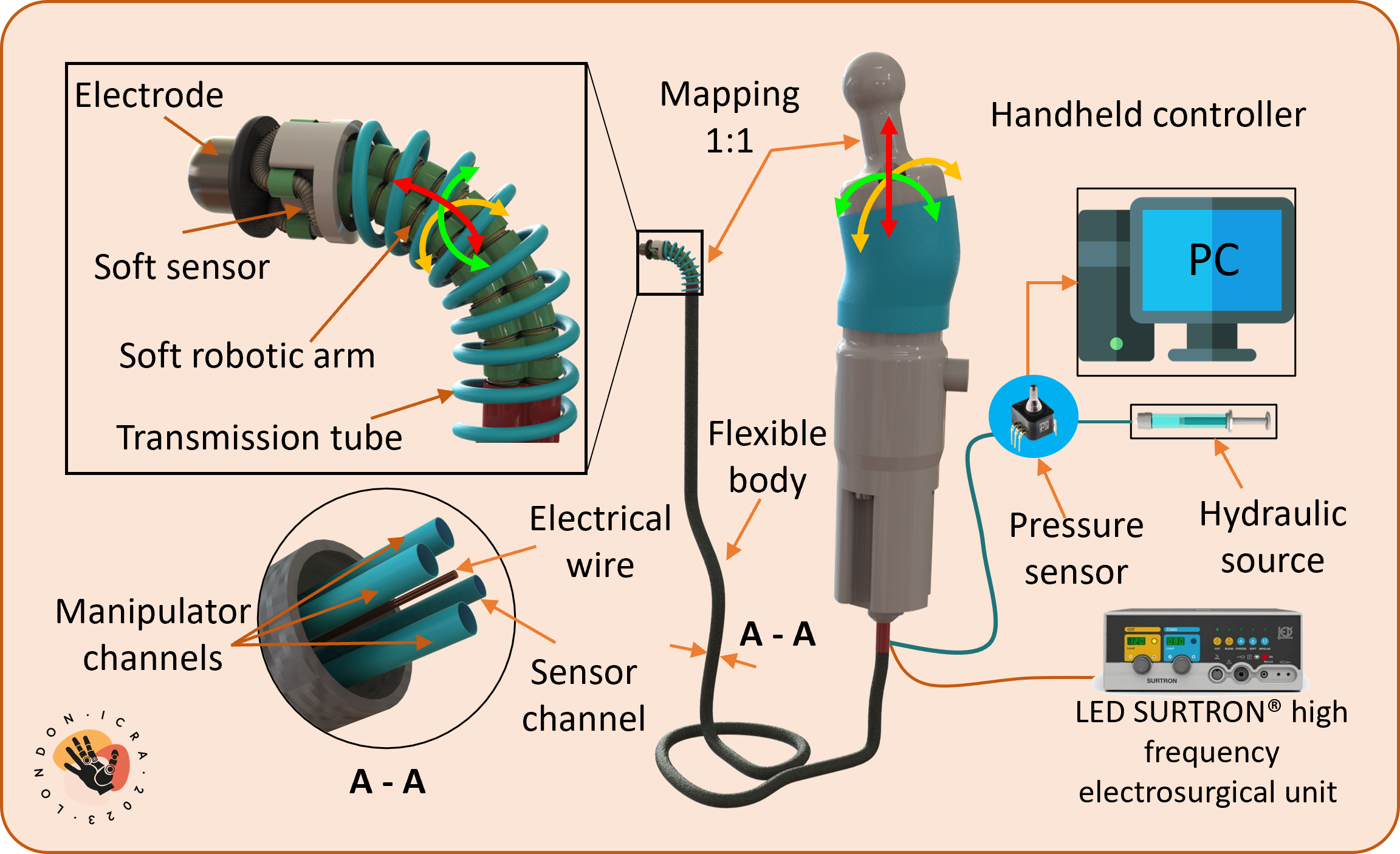
[C2] A Handheld Hydraulic Cardiac Catheter with Omnidirectional Manipulator and Touch Sensing
Published in IEEE International Conference on Robotics and Automation (ICRA), 2023
Recommended citation: Chi Cong, Nguyen. (2023). "A Handheld Hydraulic Cardiac Catheter with Omnidirectional Manipulator and Touch Sensing" IEEE International Conference on Robotics and Automation (ICRA). https://ieeexplore.ieee.org/abstract/document/10161196
Abstract
Atrial fibrillation (AF) is mostly treated via robotic catheter-based cardiac ablation procedures. Over the last few decades, cables or tendon mechanisms are at the core of available cardiac catheters. Despite advances, the use of cables often results in considerable force loss, nonlinear hysteresis, and control challenges. Most catheters are not equipped with force sensing, which increases the risk of the ablation process and decreases their efficacy in clinical settings. In addition, current catheters have a poor user interface and therefore the ablation process requires skilled or trained surgeons to steer the complex motion of the catheter tip within the heart chambers. To improve the cardiac ablation procedure, a new robotic catheter that has the ability to extend its working space without moving its flexible body and a real-time force sensor for safe operation is highly desired. In this work, a new handheld and soft robotic catheter for AF ablation is introduced. The new device consists of several improved components such as a soft manipulator for navigation and bending motion, an ergonomic handheld controller, and a soft force sensor for monitoring tool-tissue contact. The design, modeling, and fabrication of the device are presented and followed by experimental characterizations and ex-vivo validation.
PDF —— Graphical Abstract