[J3] Development of A Soft Robotic Catheter for Vascular Intervention Surgery (VIS)
Published in Sensors and Actuators A: Physical, 2023
Recommended citation: Chi Cong, Nguyen. (2023). "Development of A Soft Robotic Catheter for Vascular Intervention Surgery" Sensors and Actuators A: Physical. Vol357(114380). https://www.sciencedirect.com/science/article/abs/pii/S0924424723002297
Abstract
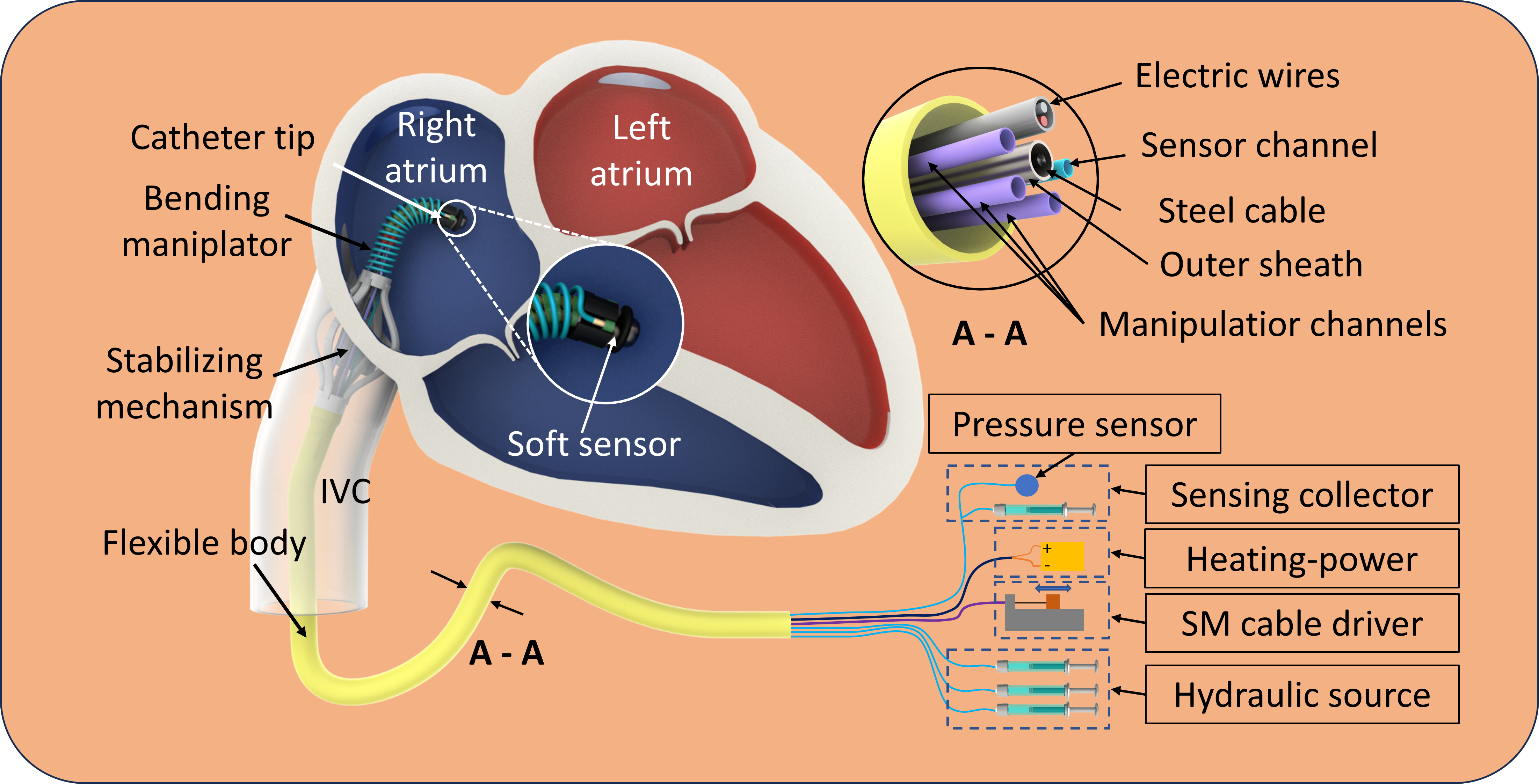
This work introduces a new concept of a miniaturized soft robotic catheter (MSRC) for the VIS. The system consists of a soft manipulator for navigation and bending motion, a variable stiffness stabilizing mechanism (VSSM), and a soft force sensor for monitoring tool-tissue contact. By employing soft hydraulic filament artificial muscles (HFAMs), the flexible manipulator has an omnidirectional and extendable workspace and can generate a force of 0.375 N, which is monitored by a new HFAM-based sensor with a high sensitivity of about 10.7 KPa/N. The new VSSM can be deployed as a lantern form with a wide diameter range from 6 mm to 25 mm, potentially enhancing the catheter tip’s stability at various blood vessels (e.g., the inferior vena cava IVC) to perform VIS. The VSSM has a controllable deploying force and is capable of withstanding highly compressed forces with little deflection. The system feasibility to perform cardiac ablation is demonstrated with a simulated heart’s right atrium (RA), potentially offering a reliable tool for the treatment of atrial fibrillation (AF). The design, modelling, and fabrication of the device are also presented and followed by experimental characterizations, and ex-vivo tests.
PDF —– Graphical Abstract